산업용 로봇이나 협동로봇을 활용한 자동화 공정이 늘어남에 따라, 3D 시각 센서를 통해 정확하고 유연한 작업을 수행하는 수요가 커지고 있습니다. 특히, 로봇 팔 말단(End-Effector)에 직접 카메라를 장착하는 “손목 카메라(Wrist Camera)” 방식은 픽앤플레이스, 정밀 검수, 조립, 머신비전 등 다양한 분야에서 활용도가 높습니다.
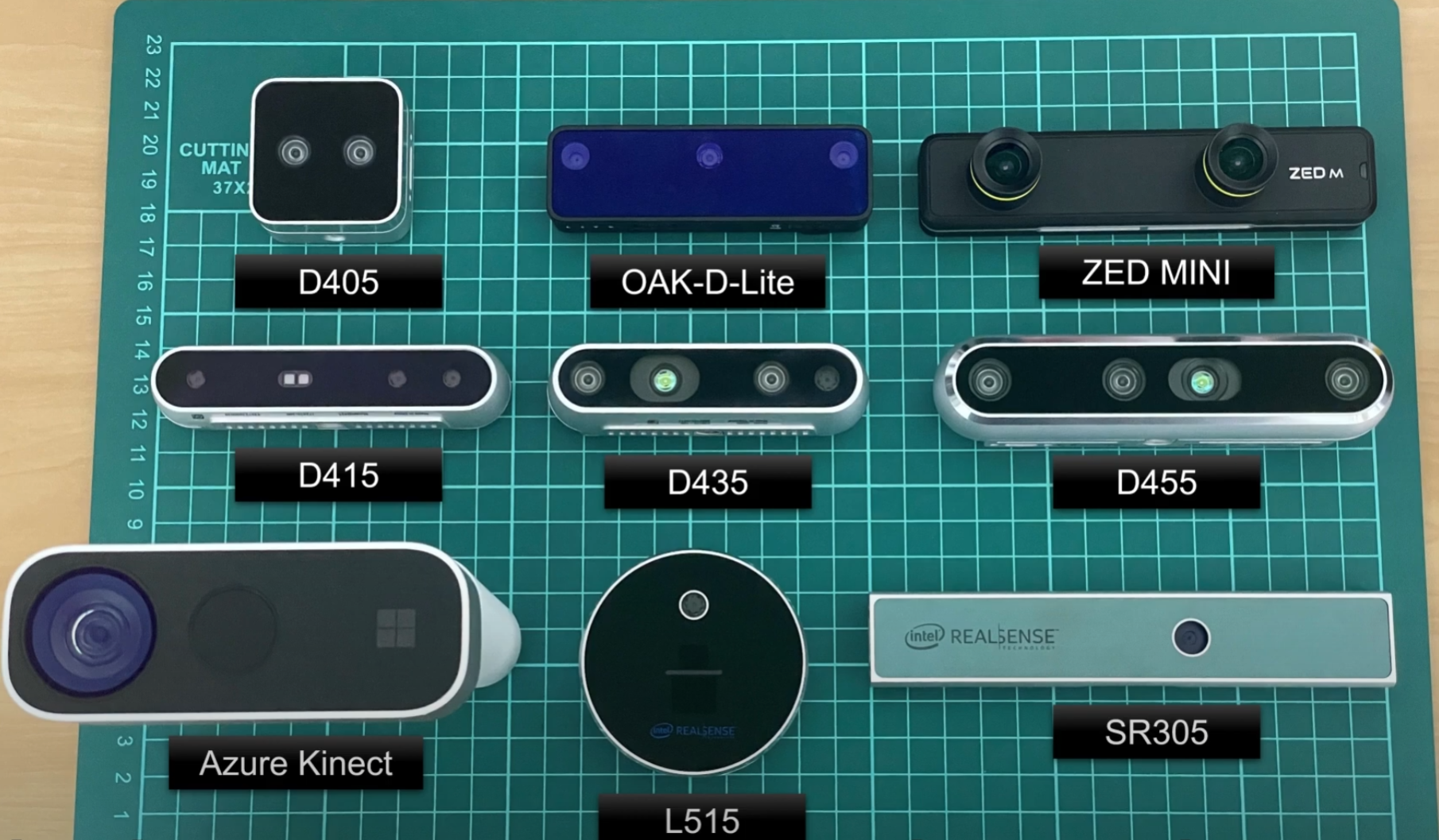
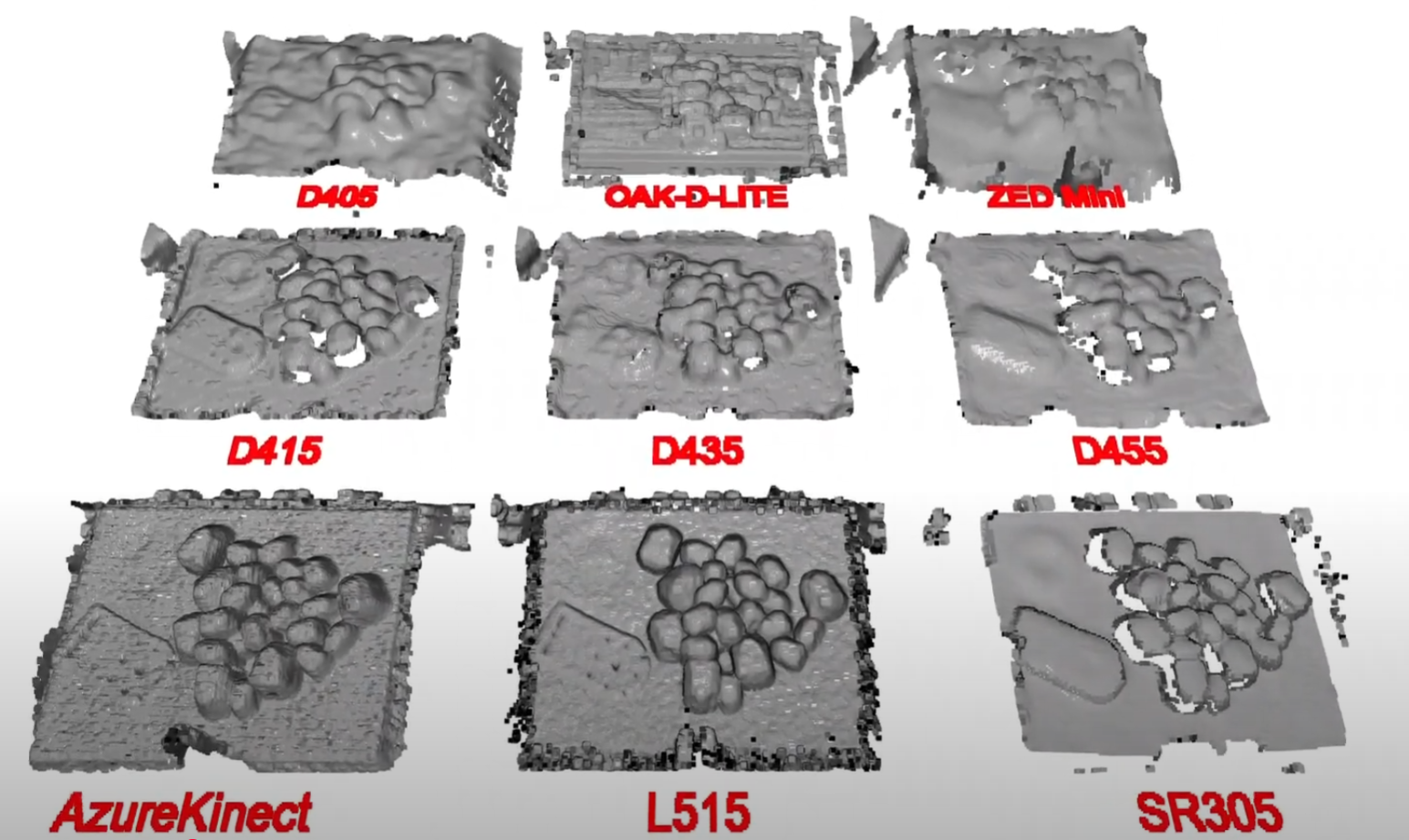
본 포스팅에서는 인텔 RealSense 시리즈(D405, D415, D435, D455, SR305, L515), Azure Kinect, OAK-D-Lite, ZED Mini까지 총 9종 깊이 카메라를 간단히 비교해 보겠습니다. 각각의 카메라는 센서 방식, FOV, 무게, 동작 거리 등에서 차이가 있으므로, 로봇 팔에 최적화된 카메라를 선택할 때 도움이 되길 바랍니다
깊이 카메라 9종 비교 표
카메라명센서 방식FOV(대략)깊이 해상도/프레임동작 거리크기(약 mm)무게(약 g)주요 특징
| Intel RealSense D405 | 스테레오(단초점) | 87° × 58° | 최대 1280×800 @ 30FPS | 0.07m ~ 0.5m (초근접 계측) | 42×42×23 | ~60 | 초근접 물체 인식에 특화. 소형 부품 픽앤플레이스 등에 최적 |
| Intel RealSense D415 | 스테레오 | 65° × 40° | 최대 1280×720 @ 30FPS 등 | 약 0.3m ~ 10m | 99×20×23 | ~72 | 좁은 FOV이지만 해상도가 높아 정밀 계측 유리 |
| Intel RealSense D435 | 스테레오 | 85° × 58° | 최대 1920×1080(컬러) / 1280×720(깊이) | 약 0.2m ~ 10m | 90×25×25 | ~72 | 광각 스테레오 뷰 제공. 빠른 동작 추적 가능 |
| Intel RealSense D455 | 스테레오(넓은 베이스라인) | 90° × 60° | 최대 1280×720 @ 30FPS | 약 0.4m ~ 10m+ | 124×29×23 | ~115 | 장거리 정밀도 높은 스테레오 센서 |
| Intel RealSense SR305 | 구조화 광(Structured Light) | 70° × 55° | 최대 640×480 @ 30FPS | 0.3m ~ 1.5m | 100×25×9 | ~55 | 근거리 위주 측정. 실내 고정형 애플리케이션에 적합 |
| Intel RealSense L515 | LiDAR(Time-of-Flight 유사 방식) | 70° × 55° | 최대 1024×768 @ 30FPS | 0.25m ~ 약 9m | 지름 61×두께 26(원통형) | ~100 | MEMS 기반 LiDAR. 매우 정확하고 콤팩트 |
| Azure Kinect | Time-of-Flight | 75° × 65°(모드별 상이) | 최대 640×576 @ 30FPS(깊이) | 0.5m ~ 3.86m(NFOV), 0.5m ~ 5.46m(WFOV) | 103×39×126 | ~440 | 고성능 RGB 카메라·IMU 내장. 무겁고 전력 소모가 큼 |
| OAK-D-Lite | 스테레오 + RGB(온보드 AI) | ~89°×58°, 컬러 ~81°×54° | 컬러 최대 12MP, 실시간 스테레오 깊이 | 실내 ~ 약 10m(스테레오) | 81×23×19 | ~52 | Myriad X 칩셋으로 NN 처리 가능. 작고 가벼워 로봇 팔에 적합 |
| ZED Mini | 스테레오 | 90° × 60° | 최대 2208×1242(컬러) @ 15FPS(깊이 포함) | 0.2m ~ 최대 15m 이상 | 143×30×53 | ~59 | 최대 15m 이상 깊이 측정. AR/VR 애플리케이션에도 활용 가능 |
로봇 팔 손목 카메라 선정 시 고려사항
- 무게 및 폼팩터
- 로봇 팔 말단부(End-Effector)에 설치되는 특성상, 카메라 무게가 가벼울수록 로봇의 부담이 줄어듭니다.
- 케이블, 마운트 브래킷 등을 포함한 총 무게를 사전에 계산해야 합니다.
- 동작 거리(최소·최대 측정 범위)
- 그립 작업처럼 가까운 물체를 잡아야 하는 경우에는 D405 같이 최소 동작 거리가 짧은 모델이 유리합니다.
- 장거리 관측이 필요한 경우에는 D455, ZED Mini 등 베이스라인이 크거나 고성능 스테레오 센서를 고려해볼 수 있습니다.
- FOV(시야각)와 해상도
- 넓은 시야각이 필요한지, 아니면 특정 대상만 정밀하게 관측해야 하는지 목적에 따라 달라집니다.
- 해상도가 높을수록 세밀한 계측이 가능하지만, 처리량 및 데이터 전송 속도(대역폭)도 고려해야 합니다.
- 조명 환경
- 스테레오 방식은 외부 조명 영향이 크고, 구조화 광(Structured Light) 센서는 강한 주변광에 취약할 수 있습니다.
- LiDAR/ToF 계열(예: L515, Azure Kinect)은 조명에 비교적 영향을 적게 받으나, 표면 반사율 등에 따라 성능이 달라질 수 있습니다.
- SDK 및 소프트웨어 호환성
- Intel RealSense, Azure Kinect, Luxonis OAK, ZED 등은 각각 전용 SDK와 ROS 패키지를 제공합니다.
- 실제 사용하려는 OS(Windows, Linux 등), 머신비전 라이브러리(OpenCV, ROS, PCL 등)와의 호환성을 미리 확인하는 것이 중요합니다.

결론
위에서 소개한 9종 깊이 카메라는 로봇 팔 손목 카메라로 활용하기에 각기 다른 강점을 지니고 있습니다.
- 근거리 초정밀이 필요한 경우: D405
- 표준적인 해상도·FOV: D415, D435
- 장거리 정확도: D455, ZED Mini
- 구조화 광 방식의 근거리 센싱: SR305
- LiDAR 기반 정밀 계측: L515
- 넓은 범위 Time-of-Flight: Azure Kinect
- 온보드 AI 처리: OAK-D-Lite
이처럼 작업 환경(조명, 거리), 사용 목적(픽앤플레이스, 머신비전, 매핑 등), 그리고 예산·호환성 등을 종합적으로 고려해 선택하면 됩니다.
위 내용이 로봇 비전 프로젝트에서 “손목 카메라” 도입을 고민하고 계신 분들께 도움이 되길 바라며, 자세한 스펙은 각 제조사의 공식 문서를 통해 다시 한번 확인하시기 바랍니다.
댓글